
It’s up to us to decide what autonomous vehicles will become
Though it can often seem like technology is speeding ahead and taking us along for the ride, in many ways our choices shape these new technologies as they are developed. Below are descriptions of eight options for autonomous vehicles (AVs) that might not be obvious, but could offer dramatically different futures for the technology.
Select:
1. Autonomous vs. Manual + Autonomous
Do we keep the steering wheel?

A primary decision point for AV design is whether or not to allow a vehicle to be operated manually, as well as autonomously. Both of these options have their proponents as companies such as Google (Waymo) and Tesla Motors have invested in one side or the other. Tesla has been progressively adding new levels of automation to its human-driven cars, while Google has pursued the other direction with its “Firefly” prototypes that have no driver controls at all.
Many people love driving their cars, and they want to keep the ability to operate them as they wish without limitations. For this group of users, autonomous technology might only be welcomed as an add-on feature that lets them temporarily relinquish control to some sort of auto-pilot. But beyond that, they will want to retain the ability to turn that automation off and to drive the vehicle as they traditionally would.
Alternatively, as more fully-autonomous operations become possible, new vehicles can be designed to operate with no reliance on human assistance at all. This creates opportunities for completely different types of vehicles, different passenger experiences, and different applications. But it also requires a concession: such vehicles would be limited in their operation to the parameters of their programming. By removing the option of a manual mode, certain abilities and freedoms for the user would be lost, but new benefits in safety, efficiency, and design could be gained. For those cars in which a human driver is still allowed to take control, many of the practical and safety limitations familiar in cars today would need to remain.
The Society of Automotive Engineers (SAE International) has defined six levels of autonomy that outline a spectrum between zero and full automation. But these six levels are perhaps not as helpful as the simple differentiation between humans having a role to play, and not being needed at all.
2. Sharing vs. Owning
Who’s car is this?
Perhaps the biggest factor in how driverless vehicles might impact society will be the choice between adopting AVs via shared use or private ownership.
In terms of people changing current practices, getting drivers to give up their current vehicles for ride-sharing or to buy a self-driving car are actually two very separate questions. Shared use and AV ownership could offer completely different benefits, and enticing drivers to either of them could be very different challenges.
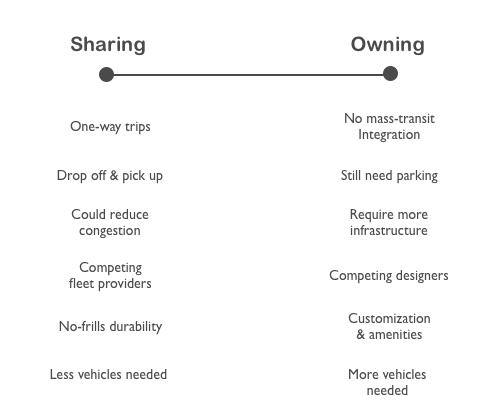
Furthermore, a future world dominated by self-driving pods that users pay for by the ride could look significantly different from one full of personally-owned autonomous vehicles. Because private vehicles would need to stay with their owners and always return home with them, they could not integrate as well with other transit options as could shared vehicles that can provide easy one-way trips. This could limit possibilities for improving city infrastructure as well as traffic congestion. Most notably, however, privately-owned AVs would still need parking – one issue that many were hoping driverless vehicles would help alleviate.
There would be economic differences between these options as well. For shared transportation there could be competition among providers, while for privately-owned vehicles the competition would be among designers and manufacturers. With performance and driver experience no longer applicable, perhaps car designers would shift to compete on passenger comforts and entertainment features – more like the world of RVs and private jets. Shared fleets, on the other hand, could look more like today’s discount airlines with each amenity costing extra, and designs focused on durability.
Lastly, as shared vehicles could be used for many rides everyday, we would simply need less of them to be built. This could have economic impacts, but also environmental, as less cars being manufactured to sit (and depreciate) each year means less energy and resources would be wasted.
3. Municipal vs. Private vs. Shared Fleets
Who’s fleet is this?

If shared models for self-driving cars are adopted, they could be developed with different options for how they are owned and operated. Although we are already familiar with some forms of ride and car sharing through traditional taxis, rental cars, as well as newer services such as Uber and Car2Go, these aren’t the only possibilities for implementing shared fleets of AVs. Communities could also build such systems themselves in line with other mass transit services, especially if much of the technology is built into the cars themselves (and not proprietary to the servers of Uber, for example). AVs could operate like city bikesharing programs do now, with revenues returning directly to municipalities instead of third-parties.
Alternatively, if driverless cars were available for anyone to purchase, co-ops could be formed by groups of users wishing to cooperate to keep down costs. Participants could buy in as part owners and enjoy shared use of the vehicles owned by the group. Likewise, those who privately own their own autonomous vehicles could choose to join sharing networks to rent out their vehicles to others when not needed. Such networks exist already for manual-driven cars in some areas, but adding autonomous capabilities could greatly expand their influence and remove many of the risk and liability issues.
Again, much of this could depend on who owns the technology (and patents). If anyone can simply buy 100 cars and start a company (as with rental cars or buses today), the marketplace for ride sharing will look very different. On the other hand, with high barriers to entry that let just one or two companies control all of the AV sharing options for a region, costs could climb back up after traditional options for transportation are “disrupted”.
4. Driverless Cars Only vs. Mix of Driverless + Manual Cars
Replace vehicles or add more?

Many of the large-scale benefits touted by proponents of self-driving cars – increased efficiency, less traffic, reclaiming parking lots – are not actually about adding AVs to our roads at all, but about removing the current automobiles. If manual-driven vehicles remain in their current numbers, none of these improvements will come. It is also worth examining which potential uses of AVs could actually make manual driving more attractive than it is now, countering any reductions from people switching to driverless cars.
 Moreover, there are another set of potential benefits to using autonomous vehicles that are only possible if ALL manual driven cars are taken off the road. Tossing aside the need for car horns, intersections, and traffic signals all might sound rather fantastic to some people, but so long as human drivers remain part of the system, they will need to remain. Beyond this, it should be pointed out that such infrastructure is not only for cars. If we continue to use vehicles in an open system (among pedestrians, bicycles, pets, etc.) there will still need to be ways to communicate between them who should have priority and when.
Moreover, there are another set of potential benefits to using autonomous vehicles that are only possible if ALL manual driven cars are taken off the road. Tossing aside the need for car horns, intersections, and traffic signals all might sound rather fantastic to some people, but so long as human drivers remain part of the system, they will need to remain. Beyond this, it should be pointed out that such infrastructure is not only for cars. If we continue to use vehicles in an open system (among pedestrians, bicycles, pets, etc.) there will still need to be ways to communicate between them who should have priority and when.
5. Centrally Controlled vs. Networked vs. Independent
Cooperation or isolation?

 Communication between vehicles can offer an array of benefits, but depending how shared information is used it can also create limiting dependencies. Cars that work together in a complete system could potentially function as a type of swarm with optimal efficiencies. One way to do this would be with a centralized control; an external computer that acts as a brain for all vehicles in the group. But although such as system could permit quite complex operations, both the flow of communication and the master control unit could be dangerous weak points that could cripple the whole system if they failed.
Communication between vehicles can offer an array of benefits, but depending how shared information is used it can also create limiting dependencies. Cars that work together in a complete system could potentially function as a type of swarm with optimal efficiencies. One way to do this would be with a centralized control; an external computer that acts as a brain for all vehicles in the group. But although such as system could permit quite complex operations, both the flow of communication and the master control unit could be dangerous weak points that could cripple the whole system if they failed.
On the other hand, vehicles that operated completely independently might be more resilient, but much less capable of fluid cooperative movement. If every vehicle follows the same program to seek the shortest route, it might not be as effective at moving traffic as if some vehicles are sent via route A and some via route B. Also, each vehicle would essentially be required to carry 100% of its computing needs onboard, while connected vehicles could possibly share data that reduced those requirements.
A middle ground we might choose could be vehicles that are networked, but not reliant on a central computer for operation. Still, choices and compromises will have to be made between the benefits of programming vehicles to work together and designing them to be self-reliant.
6. Closed System vs. Limited System vs. Open System
How capable do AVs need to be?

For those trying to artificially imitate all the abilities of a human driver, many of the challenges lie at the extremes. It is much easier to design autonomous vehicle systems that operate only during the day, in good weather, on clear new roadways, with no other traffic or obstacles involved.
But driverless vehicles won’t need to be as good as human drivers at everything to be useful. In applications that are controlled and limited, AVs need only know how to deal with a limited number of variables. Vehicles can be designed and programmed to easily perform specific tasks along specific routes, and they can be separated from pedestrians, bicycles, or other cars. In such closed systems – like with subways, monorails, or elevators – automation becomes simple.
Of course, AVs promise to be capable of much more than this, but it’s important to recognize where such limits are still necessary or useful. Autonomous taxis or buses for example might best be limited to a specific region (their metropolitan area), needing only the programming and hardware relevant to that space. Vehicles could omit technology needed for certain operations that don’t apply to them, or could be deployed sooner if cities designate specific areas for them where other traffic is restricted.
For many, AVs that operate in an open system that has no restrictions is still the goal. However, as vehicles that drive themselves as well as humans in every possible situation may still be a long way off, it is worth considering what they can do for us in the meantime.
7. Computer Override vs. Manual Override
What are we allowed to control?

Regardless of whether or not an AV can also be operated as a manually driven car (as discussed in the first topic above), the question remains as to how much control the occupants of a vehicle being operated autonomously should have over its operation. One possibility is to only give riders the ability to request their destination, perhaps before they enter (or even request) the vehicle. Once inside, passengers could then do nothing but wait.
But many people would expect, and perhaps even demand, the further ability to stop the vehicle at any time – perhaps with some sort of big red button. Like in elevators, it may nearly never get used, but knowing that the button is there could provide the sense of security riders need before climbing aboard.
We must decide, though, where a user’s control should end. Besides selecting the destination, should they be able to choose the route? If users don’t agree with the car’s actions, should they be able to override them? Conversely, which requests should the vehicle reject? Buses for example might only let passengers out at approved stations. Perhaps ride sharing AVs should do the same, or perhaps certain destination requests should not be permitted.
This leads to a bigger question: do we want to be able to command a driverless car to do something that is technically illegal? Today drivers double-park, U-turn in the middle of empty streets, and drive into undesignated areas, bending or breaking rules in many ways without harm. Some uses of vehicles (i.e. deliveries) currently even require such actions. We will need to decide which humans should have what level of control in which circumstances.
8. Private vs. Public
Alone or together?
Issues of data privacy have been brought up as important factors for users (and bystanders) of AVs, but the more traditional kind of privacy is likely to offer a key decision point for us as well. For ride sharing, the insistence of people on sticking with cars (as opposed to buses or vans) stems from our desire to avoid strangers. However, obviously for logistical reasons city transit works better when larger vehicles are used and people are mixed together based on their common destinations or direction of travel. Doing so improves efficiency and reduces traffic. But if each vehicle is used for one person, we’re right back to the inefficiency of today’s cars: each single request for a ride requires a separate AV.
We have the option, however, of building autonomous vehicles that carry multiple ride-requesters. Uber has started in this direction with its offering of Uber-Pool, allowing riders discounted fares for sharing their ride with other customers. If shared use of AVs can be encouraged, effectively a new form of public transportation will arise that could dramatically improve the reach and usefulness of current mass transit systems. Indeed, shared occupancy use of fleet-shared AVs is the only option that would drastically reduce vehicle miles traveled, and therefore traffic, pollution, and energy consumption by automobiles.
The drawback, though, is that people would lose the privacy they now enjoy in their own vehicles. The awkwardness of the shared elevator and the self-consciousness of the full subway car are transit experiences many don’t enjoy. For many people their vehicle is a comfortably personal space, an enjoyable bubble great for intimate conversation, getting lost in their thoughts, or singing along to the radio. Whether we’re willing to exchange that for efficiency and the benefit of the environment remains to be seen.
Making choices
These may seem like daunting options to be facing, and many of them might give the impression that they could just work themselves out and need not concern us. But it’s important to concern ourselves with them, especially now as these technologies are still in their early stages. We’re still in the white-board phase for many elements of AV systems, where changes are easy and cost nothing. As the choices we make could dramatically shape how autonomous vehicles impact our future, we would be wise to make them carefully and deliberately with the goals of our communities in mind. It may not be long before we find ourselves living with the results of our decisions.
More Articles on Automated Vehicles:

The Surprising Downside to Driving
The car is the perfect transportation device. It takes me anywhere, anytime I want, effortlessly and fast…
read more
AVs might not be the biggest change coming to city transportation
AVs are being hailed as the solution to our transportation problems. But the biggest wins may lie elsewhere.
read more
We can do a lot without AVs
AVs are coming… but we don’t have to wait
read more